

|
| MOQ: | 1 |
| Fiyat: | US $3500.00 - 4880.00/ Set |
| Standart ambalaj: | 2-7gün |
| Teslim süresi: | 10 |
| Ödeme yöntemi: | T/T |
| Tedarik kapasitesi: | Yılda 500 set |
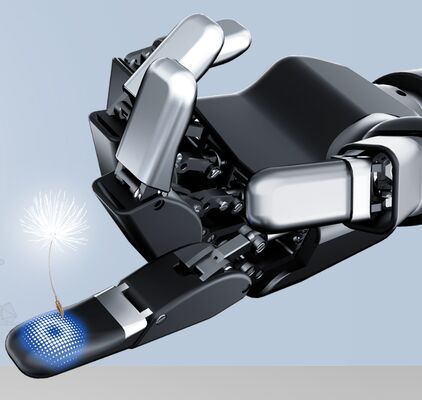
DH-Robotics DH-5-6, 6 aktif DOF'a sahip ticari bir 5 parmaklı becerikli robot elidir. Mikro lineer aktüatörler ile tendon tahrikli çalıştırma kullanır ve hassas kavrama için kuvvet/dokunsal algı entegre eder. El, maliyet etkin becerikliliğin gerektiği insansı robot uygulamaları, işbirlikçi robot uç efektörleri, araştırma ve eğitim platformları için tasarlanmıştır.
| Parametre | Özellik |
|---|---|
| Parmak Sayısı | 5 parmak |
| Aktif DOF | 6 |
| Toplam Eklemler | 12 |
| Çalıştırma | Tendon tahrikli (mikro lineer aktüatörler) |
| Algılama | Kuvvet / dokunsal geri bildirim |
| Kontrol | Hibrit pozisyon-kuvvet kontrolü |
| İletişim | CAN / RS485 / EtherCAT |
| Ağırlık | Yaklaşık 400–550 g |
| Tek Parmak Kuvveti | 5–15 N (tipik) |
|
|
| MOQ: | 1 |
| Fiyat: | US $3500.00 - 4880.00/ Set |
| Standart ambalaj: | 2-7gün |
| Teslim süresi: | 10 |
| Ödeme yöntemi: | T/T |
| Tedarik kapasitesi: | Yılda 500 set |
DH-Robotics DH-5-6, 6 aktif DOF'a sahip ticari bir 5 parmaklı becerikli robot elidir. Mikro lineer aktüatörler ile tendon tahrikli çalıştırma kullanır ve hassas kavrama için kuvvet/dokunsal algı entegre eder. El, maliyet etkin becerikliliğin gerektiği insansı robot uygulamaları, işbirlikçi robot uç efektörleri, araştırma ve eğitim platformları için tasarlanmıştır.
| Parametre | Özellik |
|---|---|
| Parmak Sayısı | 5 parmak |
| Aktif DOF | 6 |
| Toplam Eklemler | 12 |
| Çalıştırma | Tendon tahrikli (mikro lineer aktüatörler) |
| Algılama | Kuvvet / dokunsal geri bildirim |
| Kontrol | Hibrit pozisyon-kuvvet kontrolü |
| İletişim | CAN / RS485 / EtherCAT |
| Ağırlık | Yaklaşık 400–550 g |
| Tek Parmak Kuvveti | 5–15 N (tipik) |

